|
AMPHIMAX: BOAT LAUNCH & RECOVERY SYSTEM
PLEASE USE OUR A TO Z INDEX TO NAVIGATE THIS SITE OR CALL HOME
|
|||||||||||||||||
|
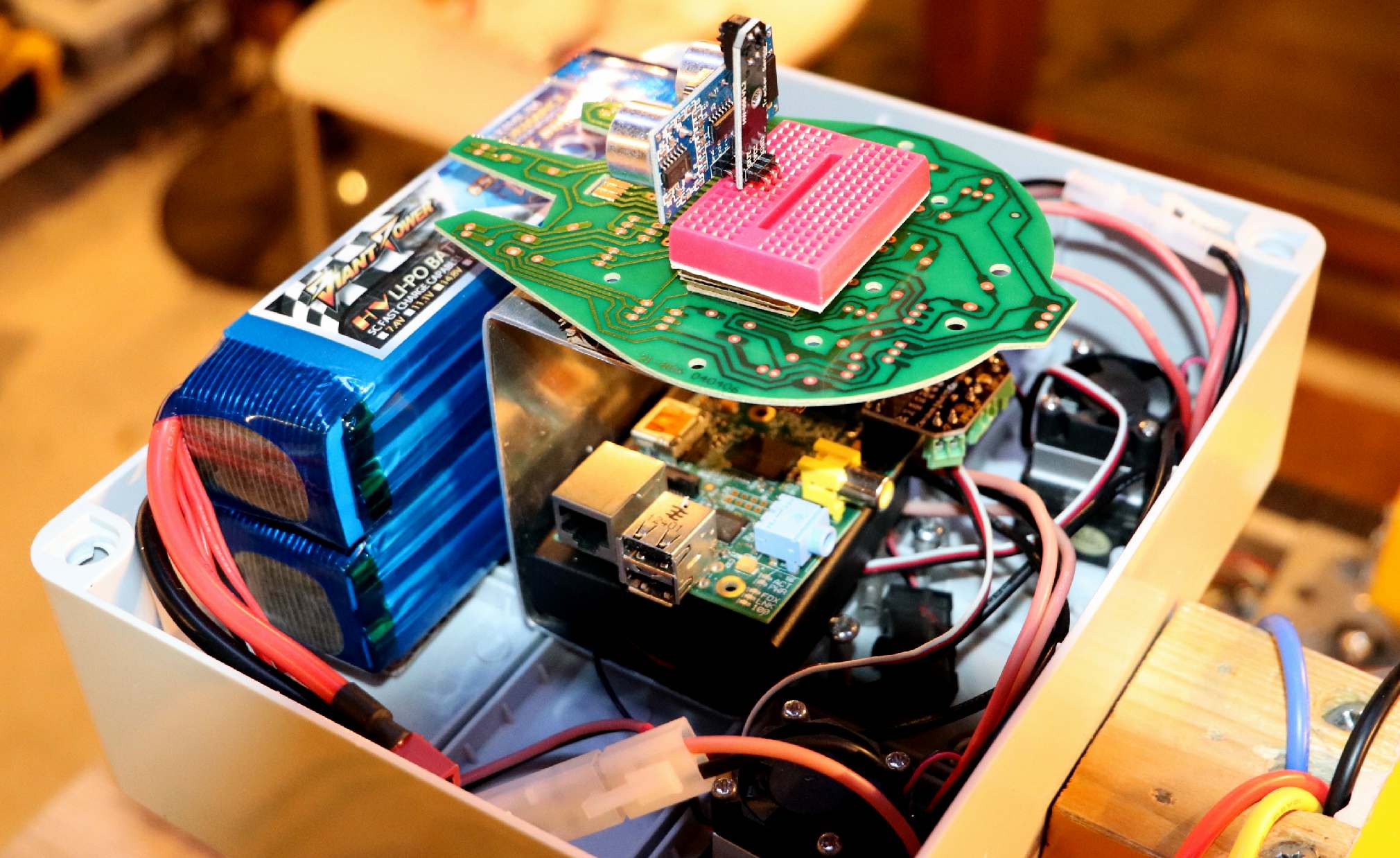
THE BRAIN - It is important to protect computers and other electronic devices from water, that would short-circuit the printed boards, and could even cause a serious discharge from the quite sizeable batteries. A Raspberry Pi is shown in this picture, with other circuit boards (sometimes called hats) on which to mount sensors with which the AmphiMax interfaces with its environment. Robotaxis use far more advanced lidars and cameras to achieve the safe operation of vehicles in a city-scape. This is a very basic version, but could graduate to a more advanced setup, as commercial packages become available at mass-produced prices. Copyright © pictures RD August 2021.
With the physical electrical wiring sorted, we need to think about sensors and computers or micro-controllers.
It might be an advantage to be able to switch from human driver, via radio control, to include automatic obstacle avoidance, or even a completely automated and unmanned launch and recovery, using a semi-intelligent program.
To enable these functions, we should include mountings for a Raspberry Pi, and multiple ranging electronic devices. The sensing devices must be able to see the beach and ocean ahead - as line of sight - to be able to avoid vessels in the water, and obstacles on the beach. In real life this could include walkers and dogs, swimmers and boating enthusiasts, or sub aqua divers, etc.
All of the control electronics (the brains) must be housed in a protective, waterproof container with a window, that we will call the 'Skull'. On an aircraft this is referred to as the 'Black Box.'
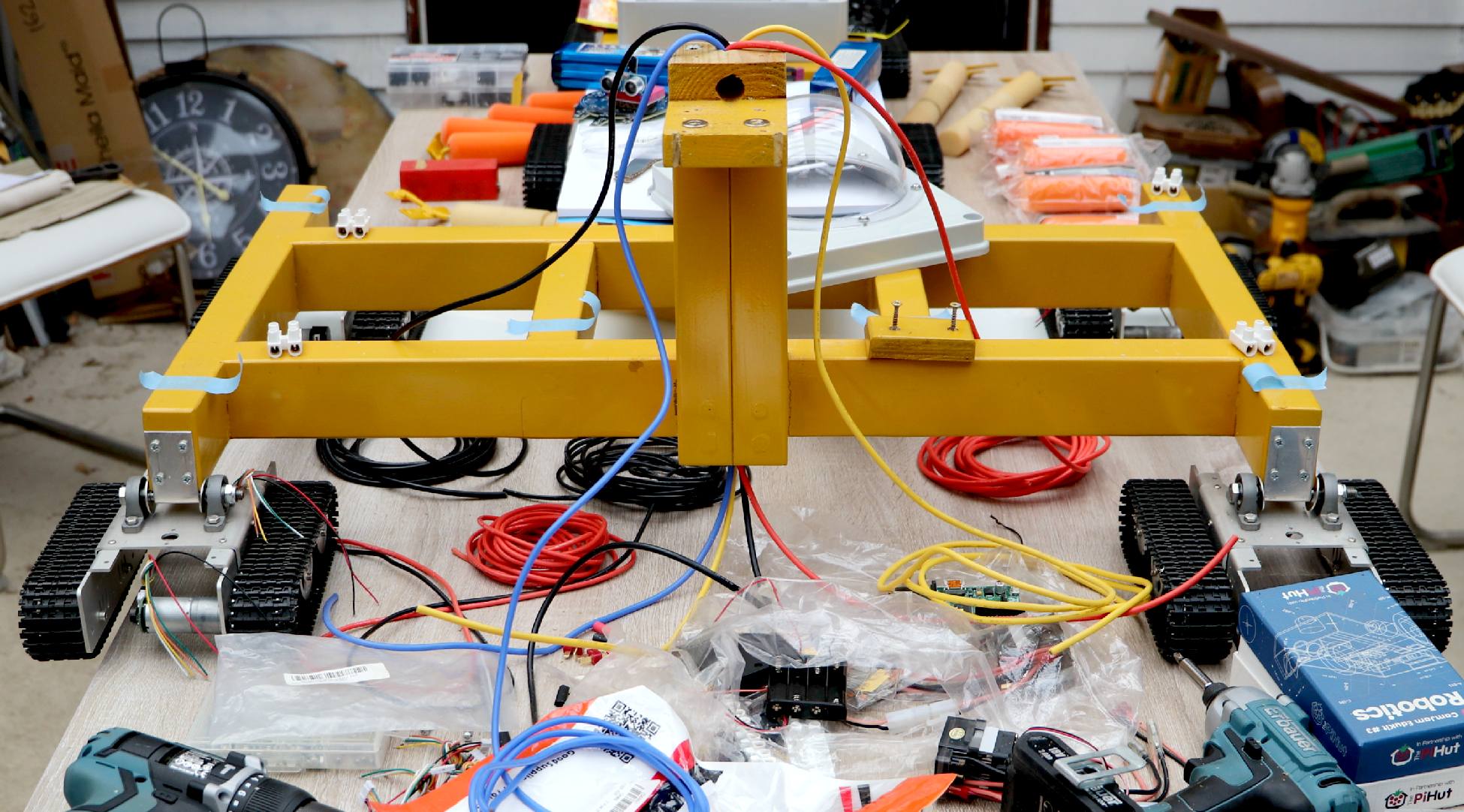
Even with a relatively large waterproof housing (Skull) for the 'Brain,' it will still take a while to work out where and how to mount the electronics, that will allow us to drive the tracked beast into a test tank, with some degree of precision. The test tank was especially built on site for such experiments. Also to gauge the performance of boat hulls in rough seas and high winds. There is still a lot of work to do on the test tank, such as completing the lowering mechanism and overhead gantry.
The switch-able operational modes might be:
1. Remote (radio or satellite [drone]) control with a human operator 2. R/C controlled, but with obstacle avoidance by simple sensors 3. Unmanned, computer programmed mode 4. Smartphone operation and monitoring
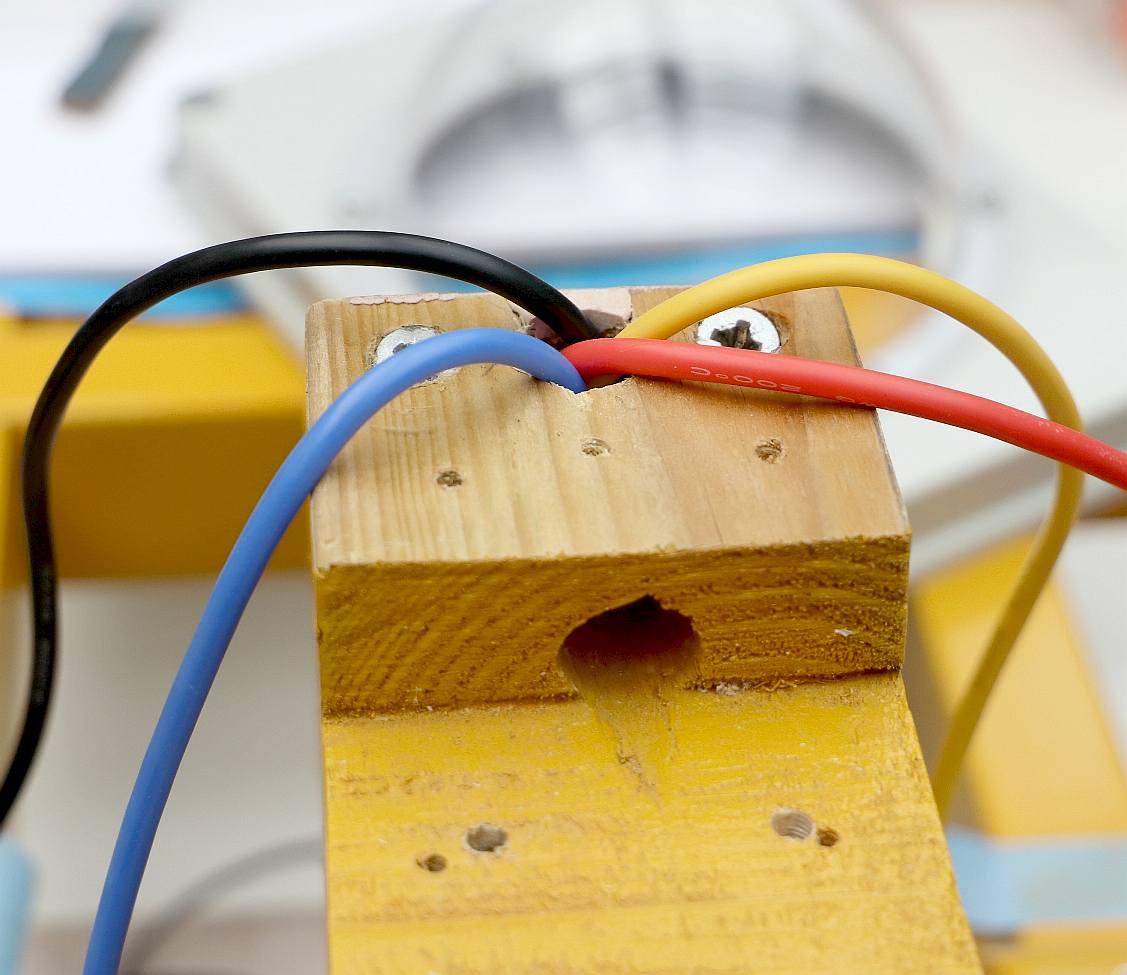
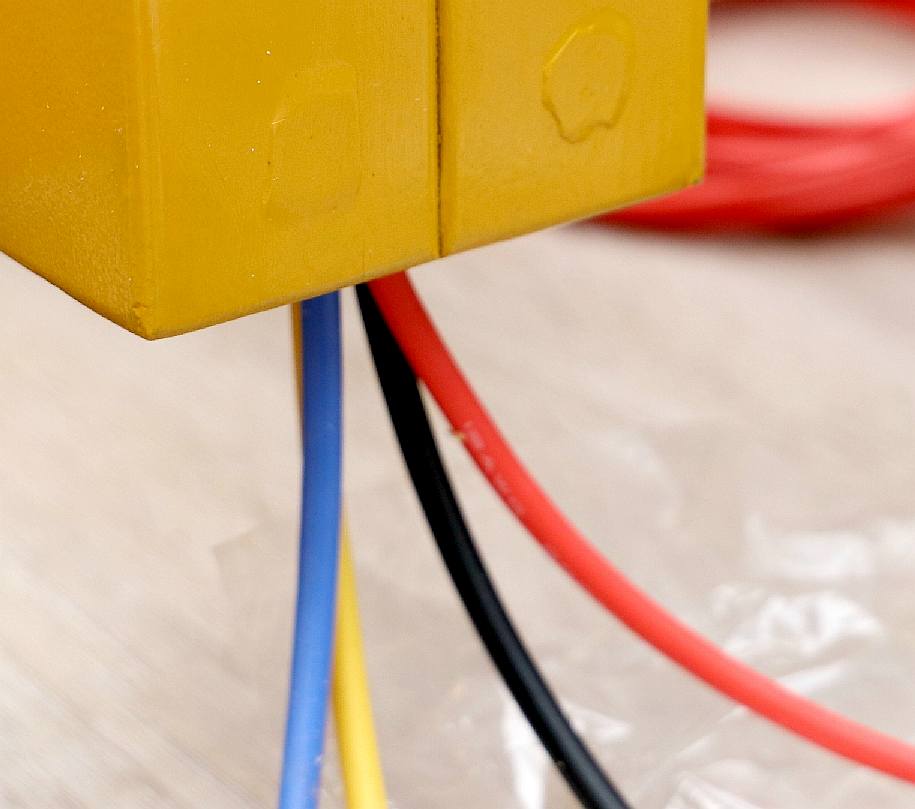
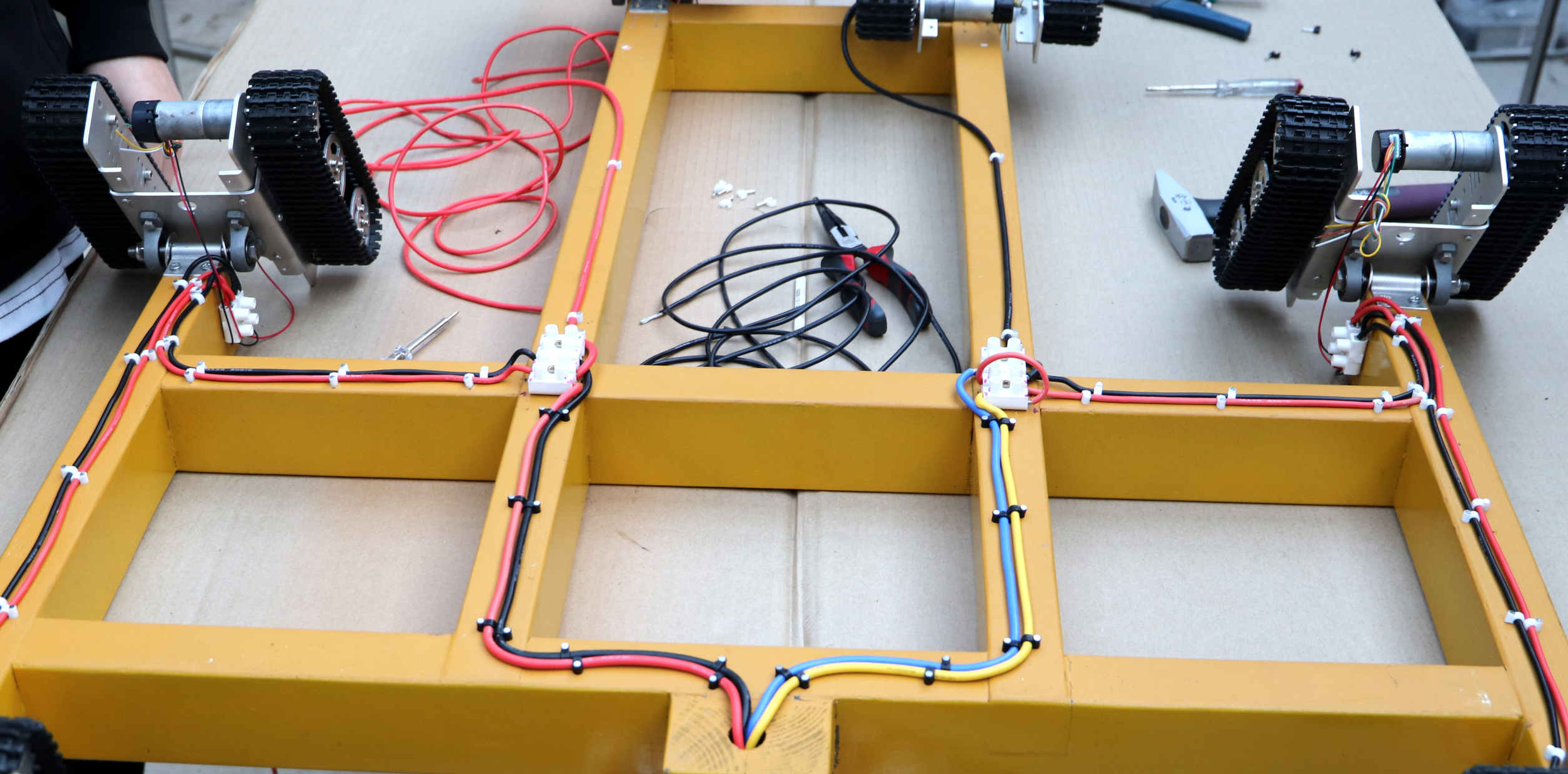
WIRING - Deciding where the wires should go is a lot of fun, if you like puzzles. We took the main power cables from the Skull, through the (wooden) tower, to the underside of the chassis.
TWIN CIRCUITS - Robots use a lot of cables of different current carrying capacity, to create movement. The wiring harness of a modern car is even more complicated, employing hundreds of automotive technicians in design and development.
WIRING - Most electric vehicles only have one motor. This vehicle uses 16 motors and 16 gearboxes. Each caterpillar tracked bogie has two motors that must be wired so that the tracks turn the same way. Colour coding is a good way of being able to identify circuits. We used Red and Black and Blue and Yellow pairs, for left and right control identification. Typically, a caterpillar tracked vehicle only has two tracks that must be able to run in opposite directions for variable track steering.
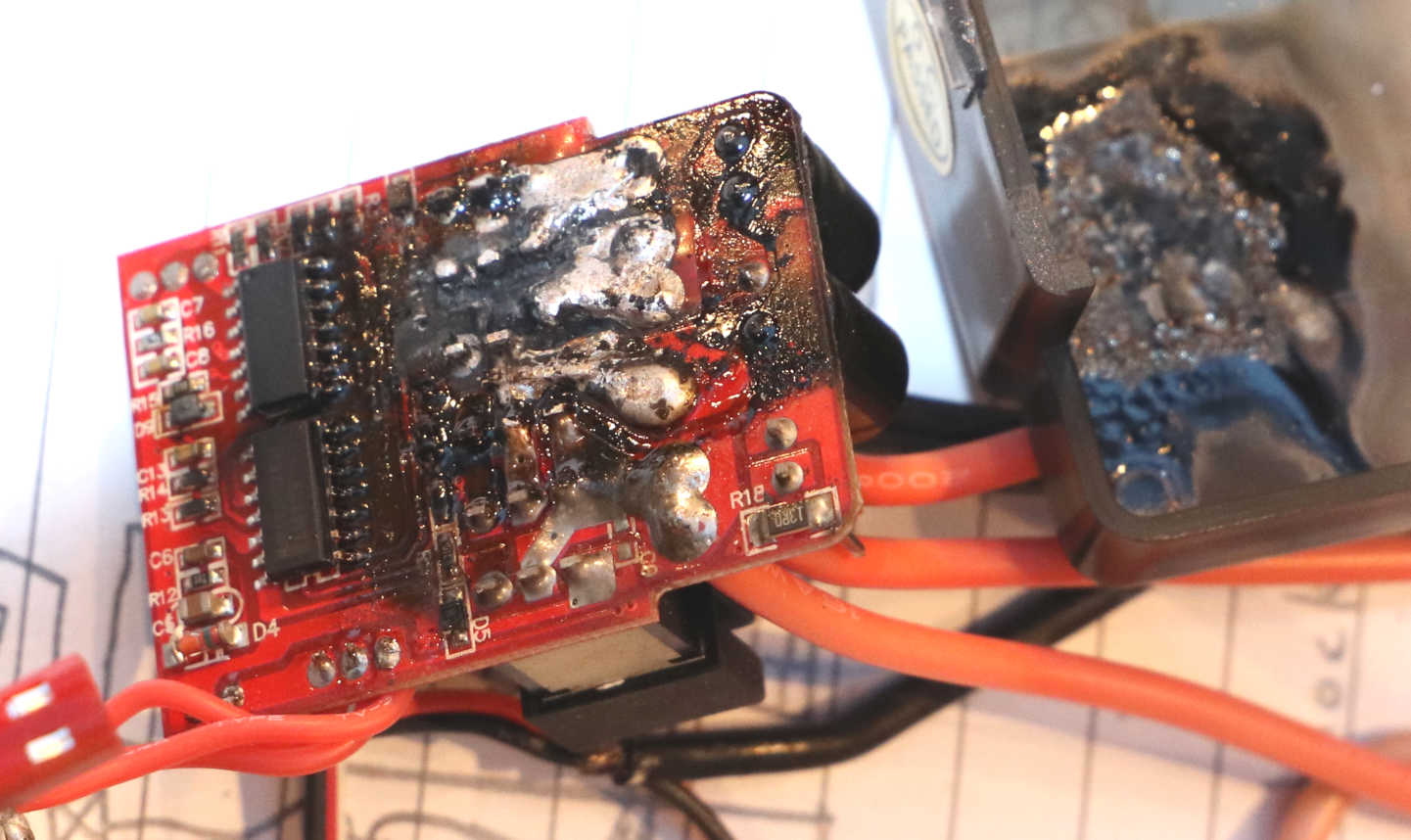
SPEED CONTROLLERS - One of the proportional digital speed controllers of Chinese origin, caught fire and blew up. This took us by surprise, where we'd only done a test rig to see if the radio control gear worked. The radio control worked on the right circuit, but blew up on the left circuit. Luckily we have spare controllers. But we should have wired in a kill switch, to shut the battery power off quickly. At least we know about the danger and can alter the circuit design, before it is all fitted into the Black Box.
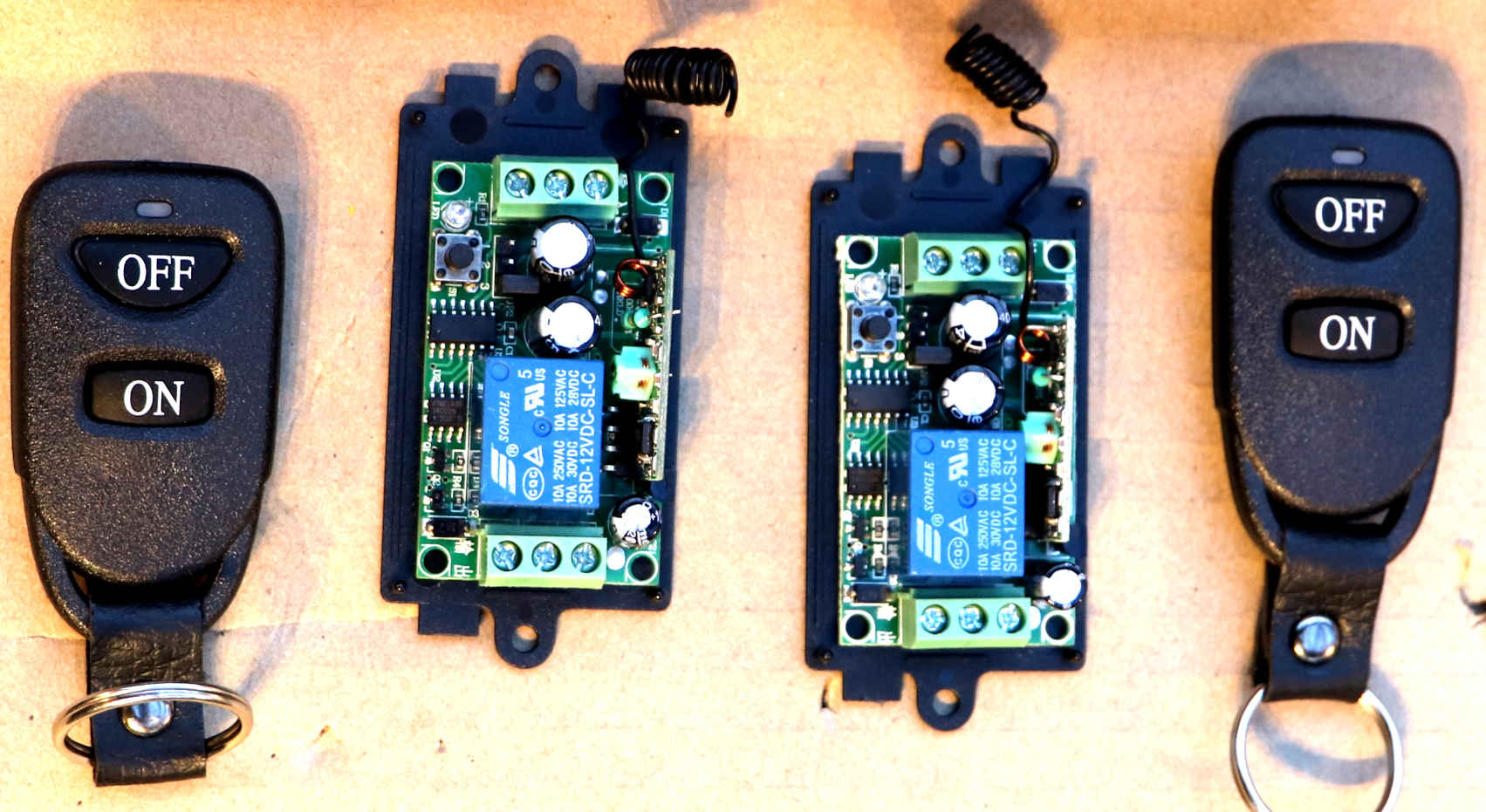
KILL SWITCHES - These neat little printed circuit boards hold a receiver and solenoid that can take a 10 amp load. This is not sufficient for the AmphiMax, but we can use the low power circuit breaker to trigger a higher power solenoid, as one might find in automotive applications. We needed two kill switches, where our left and right track circuits have separate lithium polymer battery packs. These devices are so useful, we may use them on other robotic and/or radio controlled vehicles.
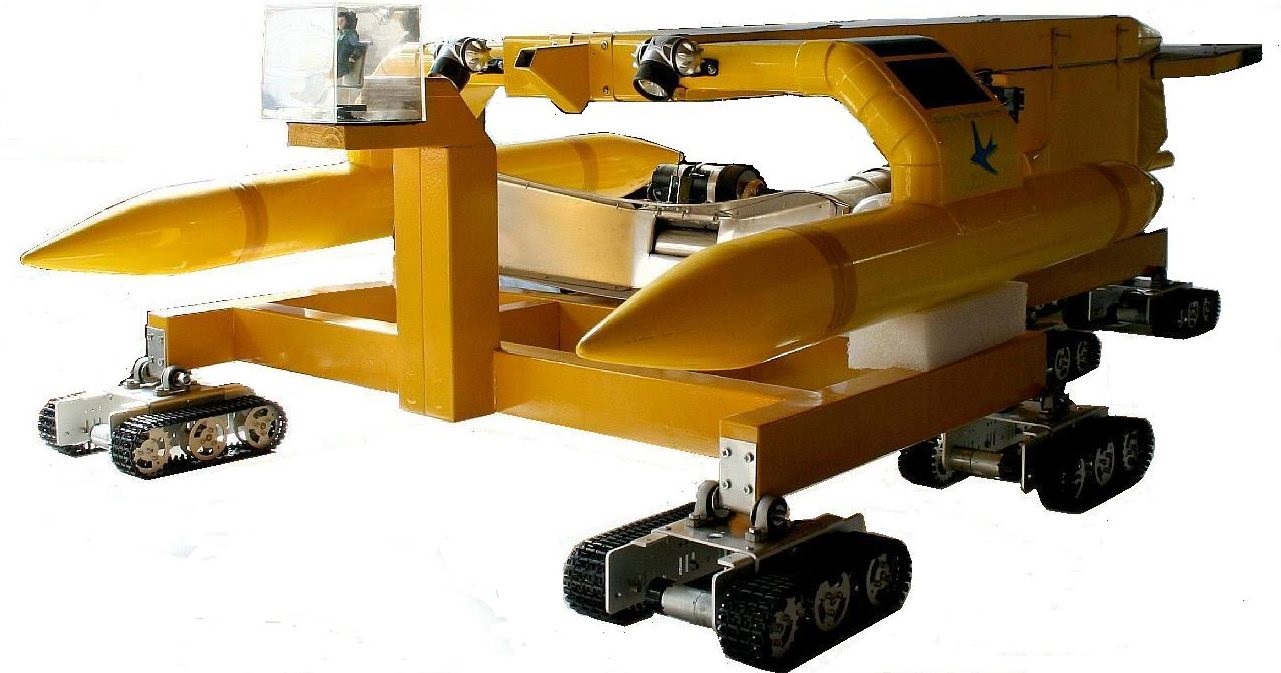
AMPHIBIOUS LAUNCHER - This is a 1/20th scale model of a beach launch and recovery system, designed originally for the SeaVax, but equally useful for other large craft. The AmphiMax is a fully navigable vehicle, able to operate as sea, such as to motor to other locations, where it is far too large to be able to use the public roads
|
|||||||||||||||||
|
|
|||||||||||||||||
|
...
This is what the Amiphimax is designed to carry. The amphibious tractor submerges in the sea, so that the (plastic) fishing vessel can launch, as in float off. This picture does not show the guides, or the cradles that the SeaVax rests on when being recovered.
|
|||||||||||||||||
|
This website is Copyright © 2021 Planet Earth Trust.. The design of the AmphiMax as featured on this website is subject to design copyright © with all rights reserved - unless stated otherwise.
|